今年九月初,特斯拉 AI 團隊詳細說明了 FSD 的更新計劃及未來藍圖,引發外界廣泛關注。隨著十月份接近尾聲,特斯拉 AI 團隊進一步發布了最新進展,強調其在端對端網路、AI 4 硬體整合和自動駕駛體驗方面的突破。
本文主要內容
同時,FSD 最新版本 v13 即將推出,將帶來多項技術升級,包括全解析度的 36 Hz 影像處理、更高效的導航與碰撞預測系統,並進一步提升駕駛平順度與安全性,讓全自動駕駛技術離實現大規模應用更近一步。
已完成的項目
高速公路端對端駕駛技術
特斯拉表示,已成功向約 50,000 名車主推送 v12.5.6.1 版本。在此版本中,特斯拉針對駕駛舒適度進行了優化,使車輛在行駛過程中能夠自然地調整速度,減少車道變換或匯入車流時的晃動。

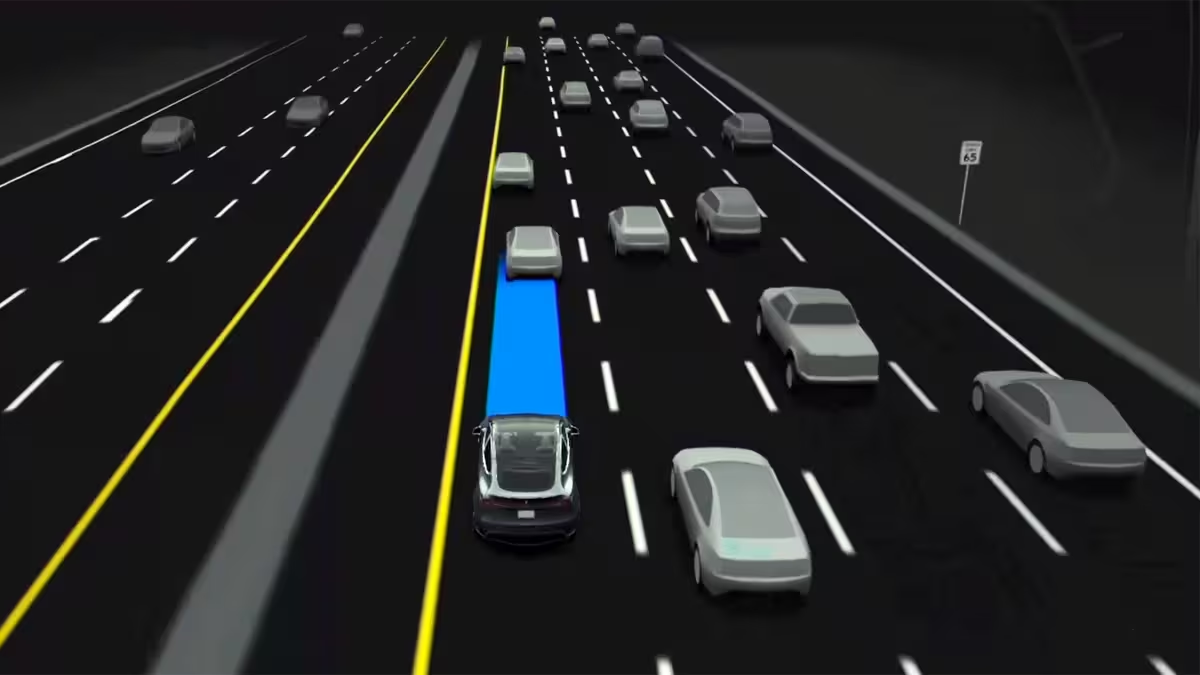
特斯拉的高速公路端對端駕駛技術基於神經網路的決策和感知系統,使自動駕駛車輛能夠在高速公路上實現從匝道進入到退出的全程自動化操作,讓車輛可以更平穩地進行加速、減速和變道,並在緊急狀況下迅速避讓或調整行車路徑。
此外,特斯拉針對 Cybertruck 進行了升級,提升了其反應能力,使其能夠更靈活地應對多變的道路條件與駕駛需求。
We, Robot 活動:展示自駕技術應用
在十月舉辦的「We, Robot」活動中,特斯拉動用了 50 輛配備最新自駕技術的車輛,成功且安全地運送了超過 2,000 名乘客。整個活動期間,這些自動駕駛車輛在複雜的實際路況中展現了精準的導航和路徑規劃能力。

此次活動中,這些配備最新自駕技術的 Cybercab、Robovan 以及 Model Y 車輛經歷了多樣化的交通場景與乘載需求,成功應對了包括多變的車流動態、行人穿越及臨時障礙物等多種挑戰,展示了其在高頻應用環境下的穩定性。
接下來的計畫
全面發佈高速公路端對端駕駛
特斯拉預計在下週全面發佈高速公路端對端駕駛功能,適用於所有搭載 AI4 硬體的車輛。此次升級內容包括提升停止時的平順度、減少不必要的惡劣天氣通知干擾,以及多項其他安全性改進。

此外,特斯拉也針對 v12.5.x 的 AI3 模型進行了改進,專注於提升城市駕駛的能力。相較於高速公路駕駛,城市駕駛更為複雜,需要處理更多樣化的路況、行人和交通標誌等情境。這些改進將有助於提升舊款車型的自駕表現。
實際智慧召喚(ASS)全球發佈
實際智慧召喚(ASS)將在歐洲、中國及其他地區推出,使車主能夠在停車場等位置更方便地召喚車輛。ASS 不僅具備更高的穩定性和靈活性,還採用了 Tesla Vision 純視覺技術取代過去的超音波傳感器,能提供即時攝影機影像,方便使用者監控周圍情況,降低視線不佳時的操作風險。
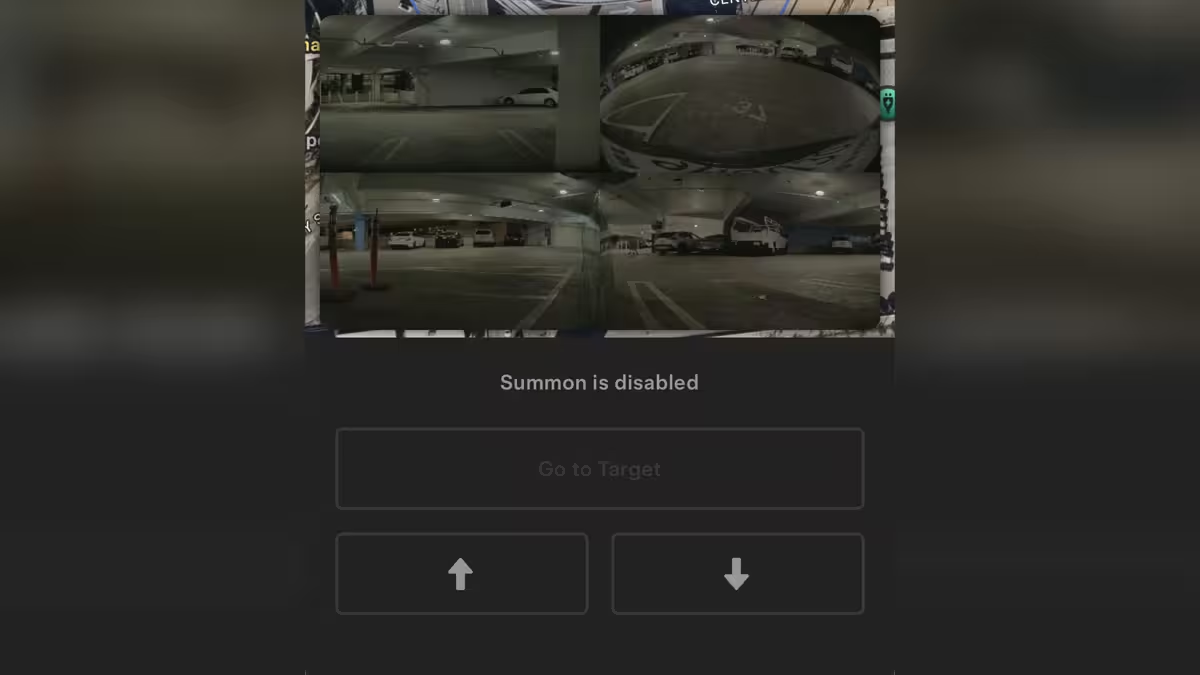
ASS 包含兩個主要模式:「請到我這」和「前往目標」,車主可選擇讓車輛自動駛向自己的位置或指定的停車點,並且可以隨時中止召喚過程。這項功能目前已在部分配備 AI4 硬體的車型上推出,而 AI3 車型也在陸續更新中。
FSD v13 包含多項技術升級
特斯拉即將發布的 v13 版本包含了一系列多項技術升級,從硬體到軟體再到資料運用,這些改進基於 AI4 硬體和全新的神經網路架構,以下是主要的技術亮點:
影像處理和神經網路升級
- 36 Hz 全解析度 AI4 影像輸入:新版本中,特斯拉導入了 36 Hz 全解析度的 AI4 影像輸入,大幅提高影像處理的精度,為自駕系統提供更為詳細且即時的視覺數據。
- 原生 AI4 輸入及神經網路架構:使用原生 AI4 輸入及全新設計的神經網路架構,系統的運算效率和反應速度顯著提升。
模型和數據規模擴充
- 3 倍模型規模擴充與上下文長度增強:新版本中,模型規模擴充至原先的 3 倍,使系統能夠處理更加複雜的場景和多樣化的數據。
- 4.2 倍數據規模擴充:數據規模的擴充將提供更多元且準確的數據支援,進一步提升自駕系統的智慧化程度。
- 5 倍訓練計算效能提升:新版本導入了 Cortex 訓練集群,支援高達 5 倍的訓練計算量,顯著增強系統的訓練效率和學習能力。

駕駛體驗與安全性改進
- 獎勵預測(Reward Prediction)的改進:防碰撞、跟隨交通控制、導航等方面的獎勵預測技術已顯著改進,基於新設計的神經網路架構,進一步加強了自駕系統在各種道路場景下的表現。
- 地圖和導航的高效處理:新版系統在地圖與導航輸入的表現上進行了改進,使其能夠更加高效地處理和理解複雜的道路網路。
- 導入音訊輸入:新增音訊輸入,使系統可以更靈敏地辨識緊急車輛的出現,例如救護車、警車的警報聲,對提高道路安全具有重要作用。

重新設計的控制模組
FSD v13 針對控制模組進行了重新設計,以實現更流暢且更精確的駕駛操控。這項改進讓車輛在加速、減速、轉向等操作中更加自然,例如能自動調整車速和方向,以應對突發障礙物或其他車輛動向,減少突兀的變速和急轉彎。

此外,精準追蹤技術使控制器能夠更穩定地維持車輛在既定軌道上行駛,無論是在高速公路上還是擁擠的市區,都能更快速處理來自周邊環境的數據,及時感知路況變化並作出精確的回應。

新版還整合了駛出、倒車及停車等功能,支援多種停車選項,包括路邊停車、車位停車、車道停車或車庫停車等。這些改進使自駕系統能夠更靈活地應對不同的停車需求,滿足車主在各種場景下的停車挑戰。
更智慧的停車功能
FSD v13 整合了「駛出停車位」(unpark)、「倒車」(reverse)和「停車」(park)三項功能。當啟動 FSD 時,車輛會小心地從停車格中倒車駛出,無論車輛是頭進或倒車停入,系統都能自動評估周邊環境並安全退出停車位。

車輛可以根據即時感測到的周圍環境資訊,靈活選擇最佳路徑和速度,以實現平順、安全的操作,使其在無人操作的情況下,能夠自主駛出、精確倒車及自動駛入停車位,完成停車情境中的各項動作。
改進攝影機清理和遮擋處理
FSD v13 對攝影機的清理和遮擋處理進行了改進,確保在雨天、灰塵等情況下能保持更清晰的影像輸入。這項改進基於 AI4 硬體的影像處理技術,進一步提升了自駕系統的可靠性,尤其是在複雜的天氣條件下。

這項改進的目的是強化 FSD 系統的「全天候」適應性,為駕駛者提供更穩定的行駛體驗,同時進一步降低了自駕系統在惡劣環境下需要人工干預的頻率。
FSD v13 的發布時程
截至目前,FSD v13 的改進已大幅提高了每次必要干預之間的行駛里程,相較於 v12.5.4 提升了 4 倍,車輛在自動駕駛模式下可以在更長距離內平穩行駛,無需駕駛者介入。

FSD v13 將於本週末開始內部員工測試,並在 11 月內透過多個小版本更新推出更多改進功能。預計到 11 月底,搭載 AI 4 硬體的車輛將迎來 v13.3 的全面發佈,包含上述提到的大部分技術升級。
延伸閱讀
特斯拉賽道模式 Track Mode V3 新增動力系統耐久性選項、提升多圈比賽表現
特斯拉 Autopilot 加入過彎輔助功能!自動降低車速、彎道表現再提升
選購特斯拉新車,可使用 TESLAGURU 的推薦連結 於官網訂購,或告知銷售顧問專屬推薦碼「10788」以獲得最新購車優惠,若您即將交付新車,不妨參考 JOWUA 周邊配件。
如果您覺得 TESLAGURU 的文章對您有幫助,歡迎追蹤 LINE TODAY 並訂閱 Google 新聞,未來搜尋用車知識更容易找到相關文章。


